실무자가 들려주는 스테핑 모터 드라이버(모터 결선)란
스테핑 모터 드라이버란
"스테핑 모터의 컨트롤러"를 의미합니다.
사실 조금 더 정확한 역할을 이야기 해보자면, 아두이노나 라즈베리파이와 같은 컨트롤러가 스테핑 모터를 구동할 수 있도록 해주는 중간 장치 입니다.
아두이노나 라즈베리파이만을 사용해서는 스테핑모터를 돌릴 수 없습니다.
이를 위해 필요한 것이 바로 스테핑모터 컨트롤러 입니다.
스테핑 모터 제어 방법
스테핑 모터 컨트롤러는 주로 SPI, I2C와 같은 통신 방법을 사용하는 경우도 있고, 와이어를 이용하여 스텝 각을 직접 전달 하는 방법이 있습니다.
SPI와 I2C에 대해 궁금하신분은 제가 작성한 글 중에 통신기술 카테고리의 SPI 통신을 확인 해주시기 바랍니다.
스텝 각을 직접 주는 방법에는 두가지 방법이 있습니다.
두가지 방법 모두 두 선을 사용하여, 신호를 주게 됩니다.
방법 1 : 방향을 선택해주는 선, 스텝 각을 전달 해주는 선
방법 2 : 왼쪽으로 회전하고자 하는 스텝 각을 전달해 주는 선, 오른쪽으로 회전하고자 하는 스텝 각을 전달 해주는 선
2상과 5상에 상관없이 두가지 방법으로 제어를 할 수 있습니다.
모터 결선 방법
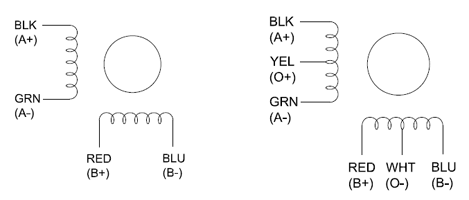
2상 모터의 경우 위 사진과 같은 구조를 가지고 있습니다.
선의 색상은 모터 제조사별로 다를 수 있습니다.
2상 모터의 경우 선이 4가닥 또는 6가닥이 있다고 말씀 드린 적이 있습니다.
모터의 자세한 내용은 스테핑 모터 1편을 확인해주시기 바랍니다.
2상 스테핑 모터를 결선 할 때는 BLK(A+), GRN(A-), RED(B+), BLU(B-) 4가지 선만 사용하여도 모터를 회전 시킬 수 있습니다.
스테핑 모터의 드라이버에는 A+ A- B+ B-를 연결하라는 부분이 있습니다. 그 부분에 올바르게 연결하면 됩니다.

위에 보이는 사진처럼 2상모터는 제어됩니다.
위 사진은 Full Step 의 방법이고, Step당 1.8도씩 회전하게 됩니다.
5상 스테핑 모터의 경우에는 아래와 같은 구조로 이루어져 있습니다.
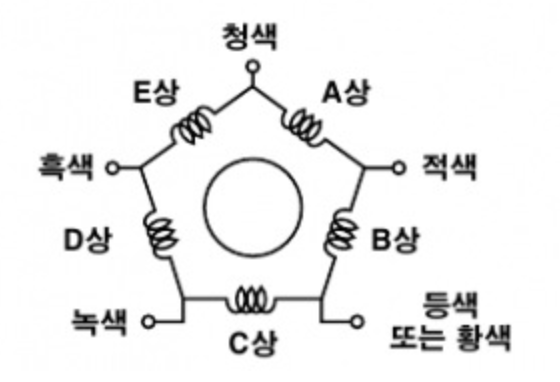
보통 모터 드라이버에 색상이 나와있어 올바른 색의 선을 연결 해주면 됩니다.
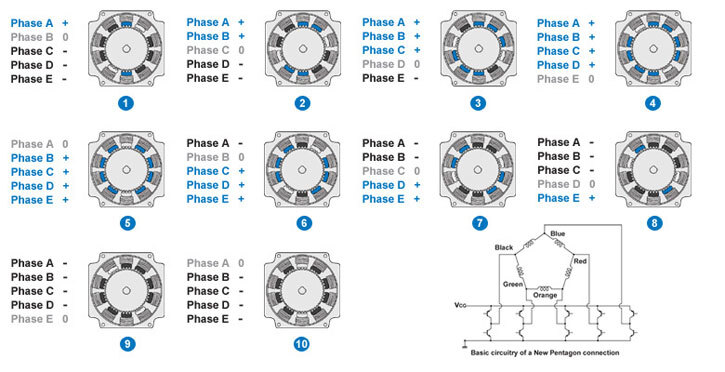
위 사진처럼 5상모터는 제어되게 됩니다.
위 사진은 Full Step 의 방법이고, Step당 0.72도씩 회전하게 됩니다.
정리하자면,
스테핑 모터 드라이버는 아두이노나 라즈베리파이와 같은 컨트롤러가 스테핑 모터를 회전할 수 있게 도와주는 장치입니다.제어 방법에는 SPI나 I2C와 같은 통신 방법, 방향과 PWM을 사용하는 방법, CW PWM과 CCW PWM을 사용하는 방법이 있습니다.모터 드라이버나 각자 상황에 맞게 사용하시면 됩니다.